TORNEIO JUVENIL DE ROBÓTICA 2024 EM TERESINA PIAUÍ
NO EVENTO DE 2023 TIVEMOS REPRESETAÇÃO DE 51 ESCOLAS
Agradecemos a todos professores e instituições pela contribuição neste evento, para crescimento da Tecnologia no Estado do Piauí !
O Torneio Juvenil de Robótica surgiu em agosto de 2009 na USP, idealizado pelo prof. Me. Luís Rogério e Dra. Leliane Nunes. O mesmo está presente em todos os estados do Brasil. No Piauí é representado pela Equipe do Centro Maker
APRESENTAÇÃO DO PROJETO DE ROBÓTICA
O projeto de robótica, tem implantado oficinas de robótica em mais de 50 escolas públicas estaduais de Teresina e Interior, direcionada a mais de 60 professores, visando a expansão da robótica no estado para realização de grandes feiras de robótica, desde 2017.
Desde 2022, estamos aliando nosssos eventos e desafios aos do TJR, para evoluir ainda mais nos eventos e torneios. Hoje nosso maior apoiador nos eventos
REGRA GERAL NO TJR 2024:
– Cada Robô só participar de um Modalidade ou Desafio no Evento
O objetivo é que os Robôs e projetos, tenham uma qualidades ainda maior e melhor desempenho especifico dentro da modalidade
NO TORNEIO TEMOS DOIS TIPOS DE DESAFIOS:
01) DESAFIOS DO CENTRO MAKER – CM. Modalidades do Estadual
02) DESAFIOS DOS TORNEIO JUVENIL DE ROBOTICA – TJR Modalidades do Nacional
– Cada modalidades ou desafio terá duas MEDALHAS para os dois primeiros colocados.
– Cada competidor dos desafios receberá certificação de participação do Evento.
– Os competidores dos Desafios do TORNEIO JUVENIL DE ROBOTICA receberação certificação da Organização Nacional do Torneio Juvenil de Robótica
Regra Geral: Cada Robo ou Projeto, pode participar APENAS DE UM DESAFIO e NIVEL no dia do evento.
– As Regras serão repassadas nos encontros dos cursos de sábado do interior, quinta e sexta feira em Teresina
– As regras serão repassadas pela Coordenação do Evento.
– As regras estão divididas em dois Grupos: DESAFIOS DO CENTRO MAKER (nivel do Estadual ) e DESAFIOS DOS TORNEIO JUVENIL DE ROBOTICA (nivel do Nacional)

ESCOLA JÁ HABILITADAS PARA COMPETIR NO NIVEL 01 e 02 NAS MODALIDADES
As escolas ja apresentaram seus KITS de carros, compativeis com as modalidades Faltando a comprovação do material e treinamento do Tecnico ou professor da Escola – NIVEL 01 e 02
ORGANIZAÇÃO EM TERESINA
AS REGRAS DE CADA DESAFIOS SERÃO REPASSADAS NOS CURSOS E FORMAÇÕES DO PROJETO:
Organizador Local. Ranildo Lopes de Sousa Penha
Contato (86)9 9547 8888
ATIVIDADES DA ORGANIZAÇÃO DO TORNEIO
– Cursos de Orientação e Suporte ao professor, escolas e Instituições do Evento EM TIMON
– Fazer treinamento dos competidores e Reunições com Coordenação Nacional :
Ranildo Lopes
As orientações são responsabilidades de cada Professor e sua Escola
https://torneiojrobotica.org/ENATER-Exame-Nacional-de-Tecnologia-em-Rob%C3%B3tica/
DESAFIOS DO CENTRO MAKER – projeto de Robotica no PIAUÍ
Cursos de Robotica ja concluidos (duas medalhas por desafio)
Projetos de Automação com Arduino ou Micro:bit ou Makey Makey
DESAFIOS DO CENTRO MAKER – Projeto de Robótica do Piauí
– Estas modalidades são Cursos de Robotica ja concluidos no projeto de Robótica
– Aqui Cada professor, projeto do Piauí ou que participou dos treinamentos, irá inscrever obrigatoriamente UM ALUNO por desafio.
– Caso o professor já tenha um aluno participante de cada Desafio, o mesmo pode inscrever mais um outro aluno, somando assim dois alunos no desafio. Da mesma forma para três alunos.
– Cada Robô ou Projeto, só poderá participar de uma Modalidades ou Desafio
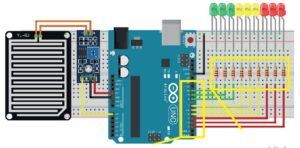
01) Projetos de Automação digital com Arduino – Obrigatório UM PROJETO para Todas as Escolas ou Instituições Inscritas NO EVENTO. Projeto apresentado pelo PROFESSOR DA INSTITUIÇÃO
A- Projetos de Automação digital com Arduino
B- Projetos de Automação analógico com Arduino
C- Projetos de Automação Display (ou módulos), LCD com Arduino
D- Projetos de Automação com MICRO:BIT
E- Projetos de Automação MAKEY MAKEY
F- Projetos de Automação M
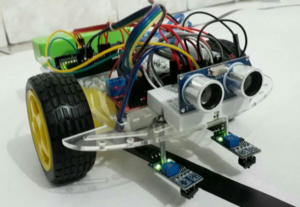
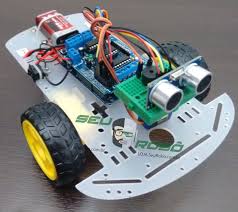
02) Carro Seguidor de Linha dois Motores – Pista Painel (com Motor Shield)
RESUMO: O objetivo é percorrer o circuito de linha contruido ( impresso ou mdf com fita isolante ) em um painel de lona. Este percussor de linha tem uma linha de 10 a 20 cm de largura, a mesma possui no mínimo 3 curvas. . As linhas pretas, com 1 cm a 2 cm de largura, existirão em toda a arena, podem ser feitas utilizando fita isolante convencional.
COMPETIÇÃO: Serão três tentativas, por percusso (termos dois niveis com medalha). O vencedor será o carro que competar o percursso em menor tempo. Caso algum concorrente não coplete o percursso, o vencedor será aque que percorreu o mais percursso, o arbitro marcará o ponto de saida de cada carro.
Pode ser usado Qualquer robor de acrlicom, com 21 cm de comprimento de chassi ( com variação de 5% de erro ) usando um dos sensores de linha abaixo
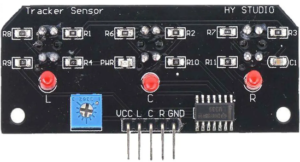 ou
ou 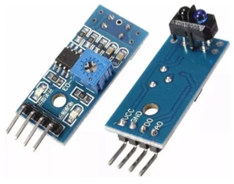
CIRCUITO NIVEL 01 PARA SER BAIXADO PARA TREINO – Para modalidade 02 e 03 do carro de linha
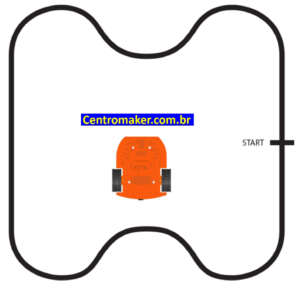
Caminho do carro SEGUIDOR DE LINHA
Caninho do carro seguidor linha 2 canais PEQUENO
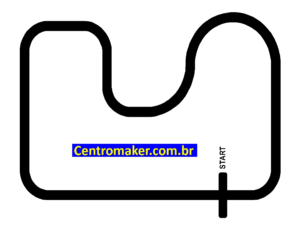
Caninho do carro seguidor outro
03) Carro Seguidor de Linha quatro Motores – Pista Painel (com Motor Shield)
RESUMO: O objetivo é percorrer o circuito de linha contruido ( impresso ou mdf com fita isolante ) em um painel de lona. Este percussor de linha tem uma linha de 10 a 20 cm de largura, a mesma possui no mínimo 3 curvas. Pode ser usado Qualquer robor com sensores de linha. As linhas pretas, com 1 cm a 2 cm de largura, existirão em toda a arena, podem ser feitas utilizando fita isolante convencional.
SOMANDO OS PONTOS espalhados pela PISTA, sem abandonar os limite

COMPETIÇÃO: Serão três tentativas, por percusso (termos dois niveis com medalha). O vencedor será o carro que competar o percursso em menor tempo. Caso algum concorrente não coplete o percursso, o vencedor será aque que percorreu o mais percursso, o arbitro marcará o ponto de saida de cada carro.
Pode ser usado Qualquer robor de acrlico de 4wd, com 256 mm de comprimento e 16 mm de largura, de chassi ( com variação de 5% de erro ) usando um dos sensores de linha abaixo
 ou
ou
04) Corrida do Carrinho Otto de Rodas – Pista Painel ( qualquer carro Otto de Rodas)
O objetivo é percorrer o circuito de linha contruido ( impresso ou mdf com fita isolante ) em um painel de lona. Este percussor de linha tem uma linha de 10 a 20 cm de largura, a mesma possui no mínimo 3 curvas. Pode ser usado Qualquer robor com sensores de linha. As linhas pretas, com 1 cm a 2 cm de largura, existirão em toda a arena, podem ser feitas utilizando fita isolante convencional.

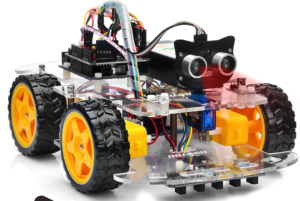
05) Pista VaiVem: Carro com Bluetooth (ou infra) – Arena com dois tabletes de 1mx1m e duas rampas de de 80 cm de comprimento. O Robô Carro deverá ser menor ou igual a 19 cm (pode ser carro 3D, carro Micro:Bit, Carro Otto,e Carro mdf, etc). Lebrando que o Carro 2wd de acrílico esta fora da medida.

06) ARENA THE BEST (caixa suspensa) – Arena da OBR (Rampa Grande)
RESUMO: O objetivo é percorrer o circuito SOMANDO OS PONTOS espalhados pela PISTA, sem abandonar os limites das linhas pretas. Haverá no percurso uma ponte que para ser vencida exigirá do robô a capacidade de vencer um aclive e, posteriormente, um declive. Pode ser usado QUALQUER ROBO com BLUETOOTH. As linhas pretas, com 1 cm a 2 cm de largura, existirão em toda a arena, podem ser feitas utilizando fita isolante convencional.



07) Partida de Futebol com Dois motores: com Bluetooth (ou infra), com DUAS bolas em quadra – Arena Futebol 130 cm x 90cm. Cada carro deverá ter placa motor Shield, com circuito a mostra.


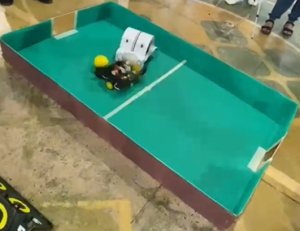

08) Partida de Futebol com Dois ou quatro motores com Prototipagem externa: com Bluetooth (ou infra), com UMA bolas em quadra – A fantasia e dimensões é livre para os copoetidores, a mesma deve esconder o circuito e placas do Carro.



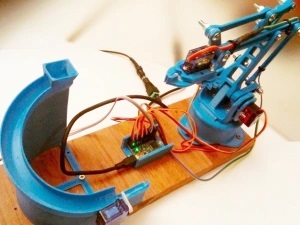
09) Braço Mecânico – Arena é uma mesa com equibrio para que o Braço Mecânico possa pegar Objetos ou Bolas, usando potenciômetro ou um par de Joystick para controlar o Braço Mecanico na Competição.
NÍVEL 01: O objetivo de Fazer o resgate de objetos, usando o controle com potenciômetro

NÍVEL 02: O objetivo de Colocar o máximo de bolinha na caixa atraves do Tobogam em um minuto,, usando o controle com par de Joystick.Ver Figura Abaixo
10) Corrida de Carro 2wd com Bluetooth: Percurso no local do Evento – Circuito criado no Local

11) Corrida de Carro 4wd com Bluetooth: Percurso no local do Evento – Circuito criado no Local

12) Performace ou apresentação do ROBO MAKER 3D: O objejtivo é que o Robo, com arduino, faça uma performace de um minuto com: DANÇA, ou ANDAR OU MOVIMENTAÇÃO, A categoria é de Robo Maker humanoid com ou sem braço. Poder usado qualquer controle ou dispositivo


REGRAS DESAFIOS DOS TORNEIO JUVENIL DE ROBOTICA – Estas modálidades LEVAM PARA O NACIONAL EM SÃO PAULO
Aqui Cada professor irá inscrever obrigatoriamente UM ALUNO por desafio.
1) Cabo de Guerra – Arena redonda (falta construir)
LINK: https://www.youtube.com/watch?v=RY-EsykxTNE
REGRAS: https://drive.google.com/drive/folders/1QhHgxx6rNUPN3l-M68SeD4kGG6x96aNK
RESUMO: Cada robô deve ser construído de forma que possa caber sempre, sem necessidade de exercer força, numa caixa de base quadrada de lados iguais a 25,0 cm e altura de 20,0 cm. O robô deve possuir no máximo 1500,0 g. Com as suas bordas postadas sobre os pontos de início, os robôs deverão estar presos por um fio inextensível com 50 cm, completamente esticado, para que possam ser acionados simultaneamente no início do round.
2) Sumô (menos 3 KG) – Arena redonda (falta construir)
LINK: https://www.youtube.com/watch?v=xqL8dhqIFDU
REGRAS: https://drive.google.com/file/d/1DukyNfct9Ke2fUWLBZGGSXLyv2ya0s7P/view
TABELA JUIZ:https://drive.google.com/file/d/1NDXweg5xaAFu9JQo8jycZkub0pw3unDm/view
RESUMO: A plataforma circular, o Dohyo, é um cilindro de 2 cm a 3 cm de altura e um diâmetro de 80 cm a 100 cm. (incluindo a borda de 2 cm a 3,5 cm). O Dohyo tem superfície clara com borda de cor negra. Durante a partido, com a exceção do julgado e um membro de cada equipe, nenhuma pessoa pode permanecer a menos de 2.2m do centro do círculo.



3) Viagem ao Centro da Terra(pista 89,0 x 120 cm) – Arena OBR, sem caixa, seguidor de linha sem rampa
LINK: https://www.youtube.com/watch?v=akzSY7qERCM
REGRAS: https://drive.google.com/drive/folders/1LciI0Nslv3-MWoi5BT3XW0J6u4h9J4Z7
1. O ponto de partida, entrada para o cenário, coincide com o ponto de saída;
2. O caminho deverá ser percorrido, completamente, ida e volta;
3. O desafio contempla um objetivo específico de retirar objeto-alvo do interior do cenário e depositá-lo no ponto onde coincidem a sua saída e a sua entrada;
4. O desafio tem um tempo limite para ser resolvido.

4) Resgate de Alto Risco (caixa suspensa) – Arena da OBR
LINK: https://www.youtube.com/watch?v=fML32zMQZnI
REGRAS: https://drive.google.com/file/d/1Jig04irjL07ZYTidAVUF3iXVj0bM-zPf/view
RESUMO: O objetivo é percorrer o circuito, sem abandonar os limites das linhas pretas de orientação, com exceção dos casos em que devem ser ultrapassados os obstáculos (TIJOLO BAIANO) e gaps ou devem vencer redutores de velocidade (LOMBADA formato meia cana de cor clara.de altura 1 cm e base de 2,5 cm), identificar e recolher o cilindro metálico de 150 g (lata de leite MOÇA sem etiqueta) para colocá-la no nicho de cor preta, quadrado preto de lado 25 cm, desenhado no piso e, por fim, o robô deverá recolher-se no nicho verde, quadrado verde de lado de 25 cm, desenhado no piso, local onde deverá encerrar a missão. IMPORTANTE: Haverá no percurso uma ponte que para ser vencida exigirá do robô a capacidade de vencer um aclive e, posteriormente, um declive.
5) Corrida de carros autônomos– Arena Lona (falta construir – é um carro seguidor de linha)
LINK: https://www.youtube.com/watch?v=codkC8XFhpg&feature=youtu.be
REGRAS: https://drive.google.com/drive/folders/1EHKVSghuxonAZSVG-bGuDQ36R-LmtmQb
RESUMO: Os carros autônomos decorrem da integração de tecnologias disruptivas, como sistemas de localização global, sistemas especialistas para a pilotagem autônoma e processos cada vez mais eficientes para fusão de sensores. A Corrida de Carros Autônomos em circuitos de pequena escala é uma maneira de fazer com que estudantes e pesquisadores enfrentem esse desafio numa escala menor de investimento. Aqui Pode ser usado o CARRINHO DE ELETRÔNICA SEGUIDOR DE LINHA

6) RESGATE NO PLANO– Arena Lona (falta construir – é um carro seguidor de linha)
LINK: https://www.youtube.com/watch?v=codkC8XFhpg&feature=youtu.be
REGRAS: https://drive.google.com/drive/folders/1RvpM9uKfgFhN3XrgKtUdl-A_iGBHtTMd
RESUMO: 1. Seguir linha e manter-se sobre esse percurso;
2. Distinguir, quando necessário, e superar obstáculos;
3. Distinguir o objeto alvo e apanhá-lo;
4. Erguer o objeto alvo, quando necessário;
5. Distinguir o nicho e depositar o objeto;
6. Integrar as competências de todos os tópicos, buscando eficácia e eficiência.




































